¶ Wegpunkteplaner
Mit dem Wegpunkteplaner kannst du deine Flugmissionen schnell, bequem und präzise und auf Wunsch sogar vollautomatisch generieren. Er verfügt über zahlreiche Funktionen wie Einzelpunkte, Gebiet, Panorama, Kreis, Gebiet Automatik mit optimaler Flugroute, Routingfunktion direkt zum Abflugort und vieles mehr.
Wichtiger Hinweis: Vor der ersten Verwendung des Wegpunkteplaners muss unter "Profil und Einstellungen" die Flugsteuerung gewählt werden, die verwendet wird, damit die Funktionen und Parameter für die verwendete Flugsteuerung angezeigt werden.
¶ Aufbau Wegpunkteplaner
Der Wegpunkteplaner wird geöffnet indem im Dashboard bei einem bestehenden Feld auf den Button "Wegpunkteplaner" oder "Wegpunkteplaner Popup" geklickt wird oder via "Neu" eine neue Flugmission erstellt wird.
Der Wegpunkteplaner besteht aus den folgenden Elementen:
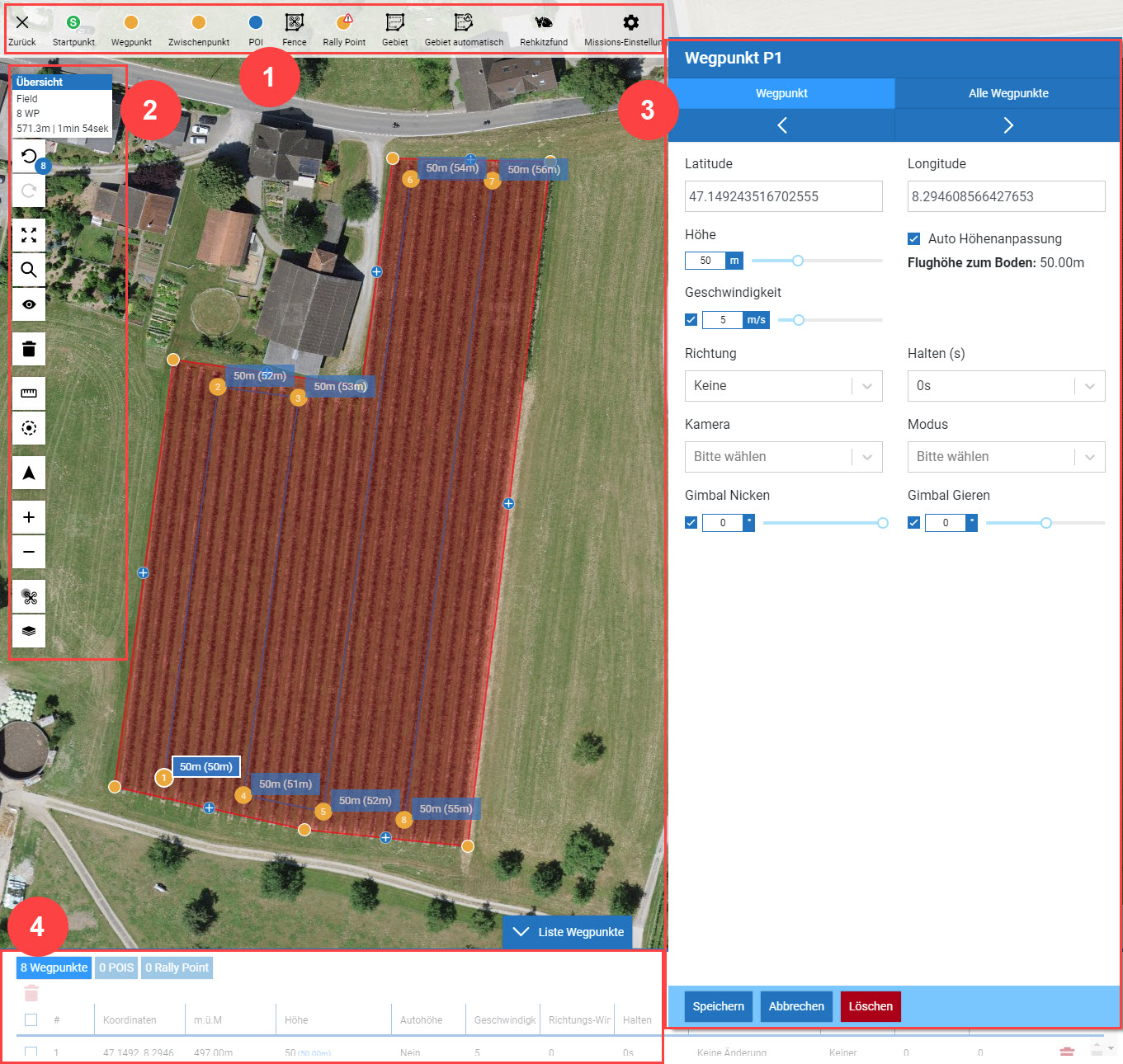
| 1: Topmenü | 2: Karte | 3: Parameter | 4: Liste Wegpunkte |
Anzeige Kartenausschnitt: Der Kartenausschnitt wird nach folgenden Regeln gewählt: 1. Priorität (Gast/Registrierter Benutzer): GPS Position von Gast/User wenn vom Benutzer nicht genehmigt, dann wird die 2. Priorität übernommen. 2. Priorität: Gast: Adresse vom ersten Formular (Eigene Angaben). Registrierter Benutzer: Adresse des Benutzers aus Profil
¶ 1 Topmenü
Im Topmenü befinden sich sämtliche Wegpunktefunktionen. Für die korrekte Verwendung vom Wegpunkteplaner bitte den Hinweis oben unter "Wichtiger Hinweis" beachten.
- Missions-Einstellungen: Siehe Beschreibung im Kapitel "Parameter" weiter unten.
- Startpunkt: Mit dem Startpunkt wird der voraussichtliche Startpunkt der Drohne markiert. Dies ist besonders für die Funktion "Gebiet automatisch" hilfreich, da so die optimale Flugroute und die Höhenanpassung direkt ab dem Startpunkt berechnet wird: Button „Startpunkt “ im Topmenü wählen und auf einen beliebigen Ort auf der Karte klicken. Ein Startpunkt kann verschoben werden, indem mit der gedrückten linken Maustaste der Startpunkt auf die neue Position verschoben und die Maustaste wieder losgelassen wird. Er kann gelöscht werden, indem im Rechte Maustaste-Menü auf "Löschen" geklickt wird (alternativ auch via Kartenmenü Funktion "Löschen").
- Wegpunkt: Mit der Funktion „Wegpunkt“ können einzelne Wegpunkte gesetzt werden: Button „Wegpunkt“ im Topmenü wählen und auf einen beliebigen Ort auf der Karte klicken. Die Einstellungen für den neuen Wegpunkt können im Fenster „Parameter“ (2) eingestellt und mit dem Button „Speichern“ bestätigt oder mit «Abbrechen» rückgängig gemacht werden. Ein Wegpunkt kann verschoben werden, indem mit der gedrückten linken Maustaste der gewünschte Wegpunkt auf die neue Position verschoben und die Maustaste wieder losgelassen wird. Ein Wegpunkt kann gelöscht werden, indem auf den Button "Löschen" geklickt wird (alternativ auch via Kartenmenü Funktion "Löschen").
- POI: Durch die Funktion "POI" (Point Of Interest) kann auf einen beliebigen Ort in der Karte ein Fokus gesetzt werden: Button „POI“ im Topmenü wählen und auf einen beliebigen Ort auf der Karte klicken. Die Einstellungen für den POI können im Fenster „Parameter“ (2) eingestellt und mit dem Button „Speichern“ bestätigt oder mit «Abbrechen» rückgängig gemacht werden. Ein POI kann wie ein Wegpunkt verschoben oder gelöscht werden.
- Landing Point: Mit der Funktion "Landing Point" wird ein Punkt gesetzt, wo die Drohne nach dem abfliegen der Mission automatisch landet (er wird auch als Failsafe verwendet): Button „Failsafe“ im Topmenü wählen und auf einen beliebigen Ort auf der Karte klicken. Ein "Failsafe" kann wie ein Wegpunkt verschoben oder gelöscht werden.
- Failsafe/Rally Point: Mit der Funktion "Failsafe" wird ein Punkt gesetzt, wo die Drohne im Notfall (Bsp. Empfangsausfall) automatisch landet. Im Störungsfall wird der nächstgelegene "Failsafe" angeflogen: Button „Failsafe “ im Topmenü wählen und auf einen beliebigen Ort auf der Karte klicken. Ein "Failsafe" kann wie ein Wegpunkt verschoben oder gelöscht werden.
- Rehkitzfund: Mit der Funktion "Rehkitzfund" kann der Fundort eines Rehkitzes markiert werden: Button „Rehkitzfund“ im Topmenü wählen und auf den Fundort auf der Karte klicken. Ein "Rehkitzfund" kann wie ein Wegpunkt verschoben oder gelöscht werden.
- FlyZone/Fence: Mit der Funktion "FlyZone" wird ein Polygon gesetzt, welches die Drohne nicht verlassen darf: Button „FlyZone“ im Topmenü wählen und der gewünschte Bereich durch Klicken mit der linken Maustaste auf der Karte markieren. Die Markierungen können verschoben werden, indem mit der Maus auf den gewünschten Marker geklickt und die linke Maustaste gedrückt gehalten wird. Gelöscht wird eine Markierung mit einem Doppelklick auf den Marker. Alternativ kann ein Marker wie ein Wegpunkt verschoben oder gelöscht werden.
- Gebiet: Mit der Funktion „Gebiet“ können mehrere Wegpunkte über ein Gebiet gesetzt werden: Button „Gebiet“ im Topmenü wählen auf einen beliebigen Punkt auf der Karte klicken. Die Einstellungen für die neuen Wegpunkte können im Fenster „Parameter“ eingestellt und mit dem Button „Speichern“ bestätigt werden. Zusätzlich zu den unten aufgelisteten Parameter stehen folgende Parameter zur Auswahl:
- Abstand Flugbahn: Der Abstand zwischen den einzelnen Flugpfaden.
- Anzahl Reihen in X: Die Anzahl der Flugpfade in der X-Achse.
- Anzahl Wegpunkte in Y: Die Anzahl der Wegpunkte in der Y-Achse.
- Abstand Wegpunkte in Y: Der Abstand zwischen den einzelnen Wegpunkten in der Y-Achse.
- Invertieren Y: Die Ausrichtung in der Y-Achse invertieren.
- Invertieren X: Die Ausrichtung in der X-Achse invertieren.
- Winkel: Die Ausrichtung des Flugpfades in Grad (0° ist Norden, 90° ist Osten).
- Gebiet automatisch: Mit der Funktion „Gebiet automatisch“ können die Wegpunkte eines Gebietes für eine optimale Flugroute vollautomatisch generiert werden: Nachdem ein Startpunkt für die Drohne mittels Funktion "Startpunkt" festgelegt wurde (optional) wird der Button „Gebiet automatisch“ im Topmenü gewählt und sofern notwendig das Feld auf der Karte markiert (Markiermöglichkeiten siehe unten Polygon/Rechteck/Shapefile). Durch wählen des Buttons „Wegpunkte generieren“ wird die optimale Flugroute automatisch generiert. Die Einstellungen für die generierten Flugpfade können im Fenster „Parameter“ eingestellt und mit dem Button „Speichern“ bestätigt werden. Zusätzlich zu den unten aufgelisteten Parameter stehen folgende Parameter zur Auswahl:
- Abstand Flugbahn: Der Abstand zwischen den einzelnen Flugpfaden.
- Abstand Feldrand: Der Abstand der Wegpunkte zum Feldrand.
- Richtung Flugpfad: Die Ausrichtung des Flugpfades in Grad (0° ist Norden, 90° ist Osten). -1 = Automatisch (möglichst optimale Richtung).
- 1. Wegpunkt wählen: Auswahl des ersten Wegpunktes.
Möglichkeiten für die Feldmarkierung: - Polygon: Ein Polygon wird markiert, indem du mit der linken Maustaste reihum auf die Grenzen des Feldes klickst. Wenn du einen Marker verschieben möchtest, so ziehe den Marker mit gedrückter linker Maustaste an den gewünschten Ort. Ein Doppelklick auf den Marker löscht diesen aus dem Polygon. Mit einem Klick mit der rechten Maustaste auf einen Marker öffnest du das "Markermenü", wo du den Marker ebenfalls löschen kannst. Ein Zwischenpunkt setzt du, indem du auf den blauen Marker mit dem Plus (+) klickst und mit gedrückter linker Maustaste den Marker an die gewünschte Position verschiebst.
- Rechteck: Nach dem Anwählen von "Rechteck" wird ein Rechteck in der Karte eingeblendet. Dieses kann mit den weissen Punkten am Rand beliebig dimensioniert werden. Mit den runden Pfeilen kann es gedreht und mit den Kreuzpfeilen verschoben werden.
- Shapefile: Mit der Funktion "Shapefile Import" kann ein Shapefile (.shp, .geojson, .gpx, .kml, .kmz) importiert werden. Dazu legst die gewünschte Datei in der Dropzone ab oder wählst eine Datei, indem du in die Dropzone klickst und im Datei-Explorer der sich öffnet die Datei auswählst und auf "Importieren" klickst. Wenn dein Shapefile mehrere Feldgrenzen enthält, kannst du im nachfolgenden Fenster das gewünschte Felder auswählen. Mit dem Button "Abbrechen" kannst du den Vorgang abbrechen.
- Photogrammetrie: Mit der Funktion „Photogrammetrie“ kann ein Gebiet mittels Photogrammetrie fotografisch festgehalten werden. Dabei werden die Wegpunkte eines Gebietes für eine optimale Flugroute vollautomatisch generiert. Der Ablauf ist wie bei "Gebiet automatisch", siehe oben. Zusätzlich zu den unten aufgelisteten Parameter stehen folgende Parameter zur Auswahl:
- Sensorbreite: Die Breite des Sensors in mm.
- Sensorhöhe: Die Höhe des Sensors in mm.
- Brennweite: Die Brennweite des Objektives in mm.
- Sidelap: Die seitliche Überlappung in %.
- Frontlap: Die vordere Überlappung in %.
- Overlap Area: Die Überlappung der markierten Fläche in %.
- Richtung: Die Ausrichtung des Flugpfades in Grad (0° ist Norden, 90° ist Osten). -1 = Automatisch (möglichst optimale Richtung).
- Wegpunkte Art: Die Auswahl ob für die Aufnahmepunkte Wegpunkte oder ein automatischer Trigger festgelegt werden soll.
- 1. Wegpunkt wählen: Auswahl des ersten Wegpunktes.
- Grid Art: Die Auswahl ob ein Grid (2D) oder Grid (3D) generiert werden soll.
- Bildbreite: Die Bildbreite in Px.
- Bildhöhe: Die Bildhöhe in Px.
- Kreis: Mit der Funktion „Kreis“ können mehrere Wegpunkte um einen Punkt gesetzt werden: Button „Kreis“ im Topmenü wählen und auf einen beliebigen Punkt auf der Karte klicken. Die Einstellungen für die neuen Wegpunkte können im Fenster „Parameter“ eingestellt und mit dem Button „Speichern“ bestätigt werden. Zusätzlich zu den unten aufgelisteten Parameter stehen folgende Parameter zur Auswahl:
- Anzahl Wegpunkte: Die Anzahl der Wegpunkte auf der Kreislinie.
- Drehung: Die Richtung in welcher sich der erste Wegpunkt befindet.
- Radius: Abstand vom Kreismittelpunkt zur Kreislinie.
- Panorama: Mit der Funktion „Panorama“ können auf einem Wegpunkt mehrere Blickwinkel gesetzt und so ein Panorama erstellt werden: Button „Panorama“ im Topmenü wählen und auf einen beliebigen Punkt auf der Karte klicken. Die Einstellungen für die neuen Wegpunkte können im Fenster „Parameter“ eingestellt und mit dem Button „Speichern“ bestätigt werden. Zusätzlich zu den unten aufgelisteten Parameter stehen folgende Parameter zur Auswahl:
- Anzahl Wegpunkte: Die Anzahl der Wegpunkte die nach Aussen gerichtet sind.
- Drehung: Die Richtung in welcher sich der erste Wegpunkt befindet.
¶ 2 Karte
Der Kartenbereich besteht aus dem Kartenmenü und der Karte.
¶ Kartenmenü
Im Kartenmenü befinden sich sämtliche Kartenfunktionen:
- Übersicht: In der Übersicht wird der Dateiname, die Anzahl Wegpunkte, die Flugdistanz und Flugzeit angezeigt.
- Rückgängig/Wiederherstellen: Mit den beiden Buttons Rückgängig und Wiederherstellen können die letzten Schritte auf der Karte (Bsp. Wegpunktverschiebungen) rückgängig oder wiederhergestellt werden.
- Übersicht: Damit wird der Kartenausschnitt so gesetzt, dass alle Wegpunkte in der Karte ersichtlich sind.
- Ort suchen: Im Suchfeld kannst du ein beliebiger Ort (Strasse, PLZ, Ort, etc.) eingeben und suchen. Um ihn auf der Karte anzuzeigen, wähle den gewünschten Ort in der Auswahlliste mit einem Klick darauf aus.
- Anzeige: In der Karte können verschiedene Marker eingeblendet werden, indem die zur Verfügung stehenden Optionen mittels einem Klick darauf aktiviert/deaktiviert werden: Feldpolygon
- Löschen: Mit der Funktion „Löschen“ können die Punkte und Markierungen gelöscht werden. Dazu wählst du den Button "Löschen", markierst im nachfolgenden Fenster die Punktekategorie mittels Checkbox und bestätigst das Löschen mit dem Button "Ausgewählte Löschen".
- Lineal: Mit dem Button „Lineal“ können Distanzen direkt in der Karte gemessen werden: Button „Lineal“ im Kartenmenü wählen den Start- und Endpunkt wählen. Durch erneutes drücken des Buttons „Lineal“ oder der Taste “ESC” wird die Lineal-Funktion beendet. Der Lineal wird nach 6 Sekunden automatisch wieder ausgeblendet.
- Kreislineal: Mit dem Button „Kreislineal“ können Radien direkt in der Karte gemessen werden: Button „Kreislineal“ im Kartenmenü wählen den Start- und Endpunkt wählen. Durch erneutes drücken des Buttons „Kreislineal“ oder der Taste “ESC” wird die Kreislineal-Funktion beendet. Der Kreislineal wird nach 6 Sekunden automatisch wieder ausgeblendet.
- Route: Mit dem Button „Route“ wird die Routing-Funktion von Googlemaps in einem neuen Fenster geladen. Dein aktueller Standort kann als Startpunkt festgelegt werden und der Wegpunkt 1 wird automatisch als Zielpunkt gesetzt. Sämtliche Routing-Funktionen von Googlemaps wie Verkehrsmittelwahl, Staumeldung und Umfahrung, Alternativrouten, etc. stehen zur Verfügung.
- Hineinzoomen/Herauszoomen: Mit den beiden Buttons Hinein- und Herauszoomen kann die Kartenansicht vergrössert oder verkleinert werden. Die Zoomfunktion mittels Maus-Scrollrad (Ctrl/Strg + Mausrad), oder Fingerzoom auf Touchscreen, ist ebenfalls möglich.
- Flugzonen: Die zur Verfügung stehenden Flugzonenlayer können ausgewählt werden, indem du sie mit einem Klick anwählst. Im Moment stehen die Layer "Airmap" (Weltweit) und "BAZL" (Nur Schweiz) zur Verfügung. Weitere Informationen zu einer Flugzone erhältst du, indem du mit der linken Maustaste auf die Flugzone klickst. Die Infobox schliesst du wieder, indem du oben rechts auf das "X" klickst.
- Layer: Die zur Verfügung stehenden Layer können ausgewählt werden, indem du sie mit einem Klick anwählst. Im Moment stehen die Layer "Google Satellite", "Swisstopo Luftbild" und "Swisstopo Pixelkarte" zur Verfügung.
Hinweis für Schweizer Benutzer: Wir empfehlen unbedingt den Layer “Swisstopo Luftbild” zu verwenden. Das Kartenmaterial ist, im Vergleich zum Kartenmaterial von “Google”, deutlich besser (Auflösung, Qualität und Aktualität). Das System verwendet für Schweiz Benutzer automatisch den Layer “Swisstopo Luftbild”, ausser der Benutzer wählt einen anderen Kartenlayer, dann wird der gewählte verwendet.
¶ Karte
In der Karte ist die Flugmission mit den Wegpunkten, Point of Interest (POI), Startpunkt, Polygon abgebildet.
- Funktionen: Die Funktionen von Wegpunkten, Point of Interest (POI), Startpunkt, Polygon sind im Kapitel “Topmenü” beschrieben.
- Zwischenpunkt: Mit der Funktion „Zwischenpunkt“ können einzelne Wegpunkte zwischen bestehenden Wegpunkten gesetzt werden: Den „+“-Button zwischen den bestehenden Wegpunkten anwählen. Dadurch wird automatisch an der Position vom „+“-Button ein zusätzlicher Wegpunkt hinzugefügt. Die Einstellungen für den neuen Wegpunkt können im Fenster „Parameter“ eingestellt und mit dem Button „Speichern“ bestätigt werden.
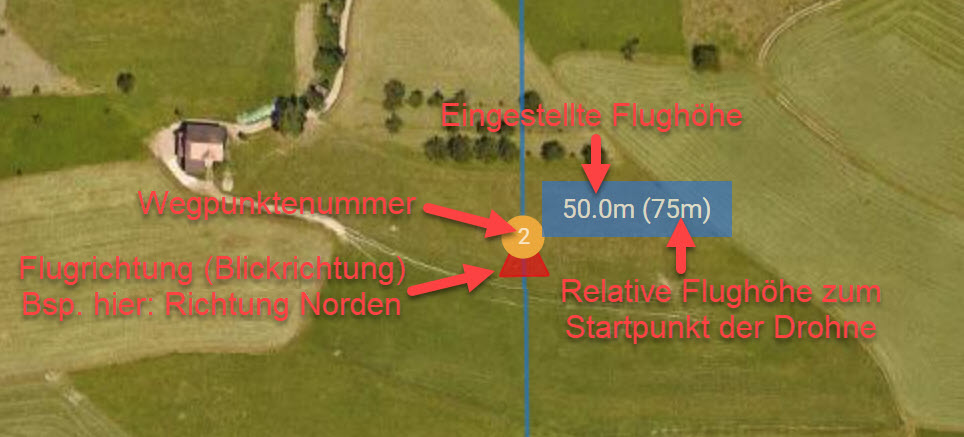
- Angaben Wegpunkte: Für jeden Wegpunkt werden die folgenden Informationen angezeigt: Wegpunktenummer; Flugrichtung (Blickrichtung: Die Richtung in welche die Drohne schaut); Flughöhen (Eingestellte Flughöhe/Relative Flughöhe siehe nachfolgende Beschreibung)
- Flughöhe: Die erste Zahl ist die eingestellte Flughöhe (die der Pilot bei jedem Wegpunkt über Boden haben möchte). Die zweite Zahl in der Klammer ist die relative Flughöhe zum Startpunkt der Drohne (damit der Pilot schlussendlich die eingestellte Flughöhe über Boden beim betroffenen Wegpunkt hat).
Als Beispiel:
Ist bei deinem Startpunkt (Wegpunkt 1) der Boden 500 m.ü.M. (= 0m für die Drohne) und der Pilot möchte dort 50m über Boden fliegen, dann zeigt es bei den Höhen 50 (50) an. Ist beim Wegpunkt 2 der Boden 525 m.ü.M. und du möchtest da aber auch 50m über dem Boden fliegen, dann zeigt es dir beim WP2 bei der Höhe 50 (75) an. Das heisst, beim WP2 fliegt die Drohne nach ihrer internen Höhenmessung auf 75m, da der Boden da aber 25m höher liegt als beim Startpunkt, fliegt sie dadurch immer noch 50m über dem Boden. - Hinweis bei Verwendung “Auto Höhenanpassung”: Der Startpunkt/Wegpunkt 1 ist bei der automatischen Höhenanpassung sehr wichtig: Die Drohne sollte unbedingt bei Wegpunkt 1 bzw. wenn an einem Ort, dann ohne grosse Höhenabweichung zum geplanten Startpunkt, gestartet werden. Dies weil die Drohne beim Starten die Höhe immer auf 0m setzt. Wenn der Startpunkt in der Höhe versetzt ist, dann hast die Drohne über die ganze Flugmission diese Differenz in der Flughöhe. Bei ein paar Metern Differenz macht das (sofern genug Reserve eingerechnet) in der Regel nicht viel, wenn der Startpunkt aber eine Differenz von 50m hat, dann kann das, selbsterklärend, grosse Auswirkungen haben.
- Flughöhe: Die erste Zahl ist die eingestellte Flughöhe (die der Pilot bei jedem Wegpunkt über Boden haben möchte). Die zweite Zahl in der Klammer ist die relative Flughöhe zum Startpunkt der Drohne (damit der Pilot schlussendlich die eingestellte Flughöhe über Boden beim betroffenen Wegpunkt hat).
¶ 3 Parameter
Unter "Parameter" kannst du die Werte für jeden Punkt (Wegpunkt, POI, Landepunkt, etc.) einstellen.
Wichtiger Hinweis: Da der UAV Editor mit verschiedenen Flugsteuerungen verwendet werden kann, ist es wichtig, dass du unter "Profil und Einstellungen" die Flugsteuerung auswählst, die du verwendest. Damit werden die Funktionen und Parameter, die für die verwendete Flugsteuerung existieren, angezeigt.
Im Parameterfenster stehen im oberen Bereich folgende Funktionen zur Verfügung:
- "Wegpunkt": Ein einzelner Wegpunkt wird bearbeitet.
- "Alle Wegpunkte": Die Parameter werden für alle Wegpunkte in dieser Mission angepasst.
- "Navigation </>": Mit den Pfeilen kann zwischen den Wegpunkten hin-/hergewechselt werden.
Im unteren Bereich des Parameterfensters stehen folgende Buttons zur Verfügung:
- "Speichern": Die Parameter-Einstellungen werden gespeichert und geschlossen.
- "Abbrechen": Die Parameter-Einstellungen werden ohne Speicherung geschlossen.
- "Löschen": Der Wegpunkt wird ohne Rückfrage gelöscht.
¶ DJI/Litchi
Mission-Einstellungen
Bei den Missions-Einstellungen stehen dir die Grundeinstellungen zur Verfügung, welche die ganze Flugmission betreffen.
- Richtungsmodus: Definiert die Richtung der Drohne während dem Flug:
- Richtung Nächster Wegpunkt: Die Drohne richtet sich immer auf den nächsten Wegpunkt aus.
- Anfangsrichtung: Die Drohne behält die Richtung bei, welche sie beim Start der Mission hatte.
- Kontrolliert durch Benutzer: Die Richtung kann während der Mission durch den Benutzer mit dem linken Joystick (Mode 2) gesteuert werden.
- Bestimmt durch Wegpunkt: Die Drohne verwendet die für jeden Wegpunkt definierte "Richtung".
- Endaktion: Wählen eine Aktion, welche die Drohne am Ende der Mission ausführen soll.
- Nichts: Die Drohne führt keine Endaktion durch.
- Heimflug: Die Drohne fliegt zum Homepunkt zurück und landet.
- Landen: Die Drohne landet.
- Zurück zum ersten Wegpunkt: Die Drohne fliegt zum ersten Wegpunkt zurück.
- Entgegengesetzt: Die Drohne fliegt die Mission im entgegengesetzten Weg zurück.
- Pfadmodus: Definiere wie die Drohne die Wegpunkte anfliegt.
- Gerade Linien: Die Drohne fliegt gerade/direkt zum nächsten Wegpunkt und wendet beim Wegpunkt.
- Kurven: Die Drohne hält bei den Wegpunkten nicht an und macht stattdessen eine Kurve. Die Kurvengrösse wird durch die Einstellung "Kurvengrösse" definiert.
- Standard-Kurvengrösse: Beim Hinzufügen eines neuen Wegpunktes wird die Kurvengrösse des vorherigen Wegpunktes auf diesen Wert (der auf beiden Seiten des Wegpunktes verfügbaren Mindestlänge) eingestellt.
- Reisegeschwindigkeit: Die Reisegeschwindigkeit definiert die autonome Fluggeschwindigkeit der Drohne. Wenn du während der Mission nicht den rechten Joystick der Fernsteuerung verwendest (Modus 2), ist die Geschwindigkeit, mit der die Drohne fliegt, die Reisegeschwindigkeit. Es kann ein negativer Wert eingestellt werden, wenn die Drohne autonom rückwärts fliegen soll. Der Wert kann während der Mission eingestellt werden.
- Maximale Fluggeschwindigkeit: Wenn während der Mission der rechte Joystick der Fernsteuerung (Modus 2) verwendet wird, kann die Fluggeschwindigkeit der Drohne bis zu diesem eingestellten Wert erhöht werden.
- Foto-Aufnahmeintervall: Definiert den Standardzeit-/Entfernungsintervall in Sekunden/Metern, wenn zwei Fotos aufgenommen werden, während sich die Drohne von Wegpunkt zu Wegpunkt bewegt. Der Intervall kann zwischen 0 und 100 Sekunden/Meter eingestellt werden. Der Intervall beginnt an jedem Wegpunkt von Neuem. Wenn der gewünschte Intervall die Geschwindigkeit der Kamera übersteigt, werden die Fotos mit der maximal möglichen Geschwindigkeit aufgenommen.
- Standardmodus für Gimbal Neigung: Standard Gimbal Neigungsmodus, der für neu hinzugefügte Wegpunkte verwendet wird:
- Deaktiviert: Die Gimal-Neigung erfolgt manuell.
- Fokus POI: Die Gimbal-Neigung wird automatisch so gesteuert, dass der gewählte POI in der Mitte des Bildes bleibt.
- Interpolieren: Die Gimbal-Neigung wird durch den Benutzer durch Eingabe des Winkel festgelegt. Damit "Interpolieren" funktioniert, muss der vorherige oder nächste Wegpunkt ebenfalls auf "Interpolieren" eingestellt werden.
Wegpunkte-Einstellungen
Diese Einstellungen kannst du bei jedem Wegpunkt einstellen. Bei POI stehen dir die Parameter "Latitude/Longitude" und Höhe zur Verfügung.
- Latitude/Longitude: Die Koordinaten des Punktes im Koordinatensystem WGS84.
- Höhe: Die Höhe des Wegpunktes im Verhältnis zur Höhe der Drohne, wo sie gestartet ist.
- Auto Höhenanpassung: Wenn die Checkbox bei Auto Höhenanpassung aktiviert ist, wird die Flughöhe auf die Bodenhöhe angepasst (Höhe im Verhältnis zum Startpunkt). Als Referenz verwenden die Drohnen Flugsteuerungen immer den Startpunkt. Daher ist es wichtig, bei Verwendung dieser Option den Startpunkt vorgängig zu definieren und die Drohne möglichst an diesem Punkt zu starten. Unterhalb dieser Einstellung wird die berechnete Flughöhe zum Boden unter "Flughöhe zum Boden" angezeigt.
- Geschwindigkeit: Die Geschwindigkeit, mit der die Drohne von diesem Wegpunkt zum nächsten fliegt. Standardmässig verwendet die Drohne die Reisegeschwindigkeitseinstellung der Mission, aber die Reisegeschwindigkeit kann mit dieser Einstellung für jeden Wegpunkt überschrieben werden.
- Kurvengrösse: Definiert die Grösse der Kurve an diesem Wegpunkt. Diese Einstellung gilt nur, wenn die Missionseinstellung "Path Mode" auf "Curved Turns" eingestellt ist. Sie gilt auch nicht für den ersten und letzten Wegpunkt, da es an diesen Wegpunkten keine Kurven gibt.
- Richtung: Die Richtung relativ zu Norden, in welche die Drohne bei der Ankunft an diesem Wegpunkt blicken wird (0° ist Norden, 90° ist Osten). Diese Einstellung gilt nur, wenn die Missionseinstellung "Richtungsmodus" auf "Bestimmt durch Wegpunkt" gesetzt ist.
- Drehrichtung: Diese Einstellung definiert die Richtung, in der sich die Drohne im oder gegen den Uhrzeigersinn dreht.
- Gimbal-Neigung: Die nachfolgenden Optionen erklären, wie die Gimbal-Neigung gesteuert wird.
- Deaktiviert: Die Gimal-Neigung erfolgt manuell.
- Fokus POI: Die Gimbal-Neigung wird automatisch so gesteuert, dass der gewählte POI in der Mitte des Bildes bleibt.
- Interpolieren: Die Gimbal-Neigung wird durch den Benutzer durch Eingabe des Winkel festgelegt. Damit "Interpolieren" funktioniert, muss der vorherige oder nächste Wegpunkt ebenfalls auf "Interpolieren" eingestellt werden.
- Grad: Eingabe der Gimbal-Neigung in Grad.
- POI: Mit dieser Einstellung kannst du ändern, auf welchen POI sich der Wegpunkt richtet.
- Foto-Aufnahmeintervall: Definiert der Zeit-/Entfernungsintervall in Sekunden/Metern, wenn zwei Fotos aufgenommen werden, während sich die Drohne von diesem Wegpunkt zum nächsten bewegt. Das erste Foto wird aufgenommen, wenn die Drohne den aktuellen Wegpunkt verlässt. Standardmässig verwendet diese Einstellung den Wert der globalen Missionseinstellung 'Photo Capture Interval'.
- Aktionen: Die Aktionen werden ausgeführt, wenn die Drohne am Wegpunkt ankommt. Jeder Wegpunkt kann bis zu 15 verschiedene Aktionen haben.
- Halte für: Die Zeit in Sekunden, die die Drohne am Wegpunkt pausieren soll.
- Fotoaufnahme: Die Kamera wird ein Bild aufnehmen. Damit diese Aktion funktioniert, muss die Aufnahme aus sein.
- Starte Videoaufnahme: Die Kamera beginnt mit der Aufnahme.
- Stoppe Videoaufnahme: Die Kamera stoppt die Aufzeichnung.
- Drehe Kopter: Die Drohne wird um den angegebenen Winkel gedreht. Das Parameter ist der Winkel relativ zu Nord, um den sich die Drohne drehen soll (0° ist Norden, 90° ist Osten).
- Neige Kamera: Das Gimbal bewegt sich auf den angegebenen Winkel (Neigung). Der gültige Wertebereich ist +0° bis -90° (Blick nach unten).
- Grad: Eingabe der Gimbal-Neigung in Grad.
- Panorama: Es werden automatisch die erforderlichen Aktionen für ein vollständiges 360°-Panorama aus 7 Fotos (51°-Winkelabweichung) hinzugefügt. Bereits bestehende Aktionen werden überschrieben.
¶ Mikrokopter
Mission-Einstellungen
Die Flugsteuerung "Mikrokopter" unterstützt diese Funktion nicht.
Wegpunkte-Einstellungen
Diese Einstellungen kannst du bei jedem Wegpunkt einstellen. Bei POI stehen dir die Parameter "Latitude/Longitude" und Höhe zur Verfügung.
- Latitude/Longitude: Die Koordinaten des Punktes im Koordinatensystem WGS84.
- Toleranz: Der Radius um den Wegpunkt, in dem die Flugsteuerung den Wegpunkt als "erreicht" erkennt.
- Höhe: Die Höhe des Wegpunktes im Verhältnis zur Höhe der Drohne, wo sie gestartet ist.
- Ausrichtungsart: Die Blickrichtung der Kamera (Auswahl: kein, Winkel (mit Eingabe), POI, WP).
- Richtung: Eingabe des Winkels wenn in "Ausrichtungsart" Winkel gewählt wurde.
- Geschwindigkeit: Die Geschwindigkeit, mit der die Drohne von diesem Wegpunkt zum nächsten fliegt.
- Wartezeit: Die Wartezeit beim Wegpunkt.
- Kamerawinkel: Der Blickwinkel (Neigung) der Kamera (Auswahl: off, Auto, Angle (mit Eingabe).
- Steigrate: Die Steig- / Sinkgeschwindigkeit zwischen Wegpunkten unterschiedlicher Höhe. Wird kein Wert ausgewählt (no climb) bleibt der MK in der aktuellen Höhe.
- WP-Event: Bestimmt wie lange (Millisekunden) ein gesetzten Kästchen der Bitmaske den Schaltausgang "ein/aus" schaltet.
- AutoTrigger: Löst den Schaltausgang automatisch alle X-Meter aus.
- Prefix: Auswahl an Buchstaben für Wegpunkte (zur Unterscheidung wenn viele Wegpunkte gesetzt werden).
¶ Pixhawk
Mission-Einstellungen
Bei den Missions-Einstellungen stehen dir die Grundeinstellungen zur Verfügung, welche die ganze Flugmission betreffen.
- Reisegeschwindigkeit/Fluggeschwindigkeit: Die Reisegeschwindigkeit definiert die autonome Fluggeschwindigkeit der Drohne.
- Schwebegeschwindigkeit: Die Schwebegeschwindigkeit definiert die standardmässige Reisegeschwindigkeit für die Missions-Statistik. Sie beeinflusst nicht die Reisegeschwindigkeit/Fluggeschwindigkeit der Flugmission.
Wegpunkte-Einstellungen
Diese Einstellungen kannst du bei jedem Wegpunkt einstellen. Bei POI stehen dir die Parameter "Latitude/Longitude" und Höhe zur Verfügung.
- Latitude/Longitude: Die Koordinaten des Punktes im Koordinatensystem WGS84.
- Höhe: Die Höhe des Wegpunktes im Verhältnis zur Höhe der Drohne, wo sie gestartet ist.
- Auto Höhenanpassung: Wenn die Checkbox bei Auto Höhenanpassung aktiviert ist, wird die Flughöhe auf die Bodenhöhe angepasst (Höhe im Verhältnis zum Startpunkt). Als Referenz verwenden die Drohnen Flugsteuerungen immer den Startpunkt. Daher ist es wichtig, bei Verwendung dieser Option den Startpunkt vorgängig zu definieren und die Drohne möglichst an diesem Punkt zu starten. Unterhalb dieser Einstellung wird die berechnete Flughöhe zum Boden unter "Flughöhe zum Boden" angezeigt.
- Geschwindigkeit: Die Geschwindigkeit, mit der die Drohne von diesem Wegpunkt zum nächsten fliegt. Standardmässig verwendet die Drohne die Reisegeschwindigkeitseinstellung der Mission, aber die Reisegeschwindigkeit kann mit dieser Einstellung für jeden Wegpunkt überschrieben werden
- Richtung: Die Richtung der Drohne, relativ zu Norden (0° ist Norden, 90° ist Osten):
- Keine: Es wird keine Richtung festgelegt.
- Nächster Wegpunkt: Die Drohne richtet sich immer auf den nächsten Wegpunkt aus.
- Winkel (mit Eingabe): Die Drohne verwendet die unter Richtungs-Winkel definierte "Richtung".
- POI: Die Drohne richtet sich zum unter "Auswahl" gewählten POI aus.
- WP: Die Drohne richtet sich zum unter "Auswahl" gewählten WP aus.
- Halten: Die Zeit in Sekunden, die die Drohne am Wegpunkt pausieren soll.
- Kamera: Die Kamerafunktion welche ausgeführt werden soll:
- Keine Änderung: Der Aktueller Modus/Kameraeinstellungen bleiben unverändert.
- Foto aufnehmen: Es wird ein Foto auf der aktuellen Position aufgenommen.
- Foto aufnehmen (Zeit): Es werden Fotos über einen definierten Zeitraum aufgenommen.
- Foto aufnehmen (Distanz): Es werden Fotos nach einer definierten Flugdistanz auf aufgenommen.
- Foto aufnehmen stoppen: Die Aufnahme von Fotos wird gestoppt.
- Videoaufzeichnung starten: Die Videoaufzeichnung wird gestartet.
- Videoaufzeichnung stoppen: Die Videoaufzeichnung wird angehalten.
- Modus: Der Kameramodus wird festgelegt:
- Keiner: Es wird kein Modus festgelegt.
- Foto: Die Kamera macht Fotoaufnahmen.
- Video: Die Kamera macht Videoaufnahmen.
- Überwachung: Die Kamera befindet sich im Überwachungsmodus, d. h. Fotomodus mit Automatikbelichtung und nicht bearbeiteten Farben.
- Gimbal Nicken: Die Neigung des Gimbals in Grad. Der gültige Wertebereich ist +0° bis -90° (Blick nach unten).
- Gimbal Gieren: Die Richtung des Gimbals, relativ zu Norden (0° ist Norden, 90° ist Osten). Wenn die "Gimbal-Richtung" gleich wie die "Richtung" ist, zeigt die Kamera auf die Vorderseite der Drohne.
¶ Yuneec
Mission-Einstellungen
Die Missions-Einstellungen von Yuneec sind identisch mit den Missions-Einstellungen von Pixhawk. Informationen über die Parameter siehe oben.
Wegpunkte-Einstellungen
Die Wegpunkte-Einstellungen von Yuneec sind identisch mit den Wegpunkte-Einstellungen von Pixhawk. Informationen über die Parameter siehe oben.
¶ 4 Liste Wegpunkte
In der "Liste Wegpunkte" werden sämtliche gesetzten Wegpunkte und deren Parameter übersichtlich aufgelistet. Die Liste wird geöffnet/geschlossen durch einen Klick auf das Label "Liste Wegpunkte". Die Höhe der Liste kann mittels linker, gedrückter Maustaste auf den oberen Listenrand individuell angepasst werden. Die Liste kann nach Art der Punkte, durch Anwählen der Filter oben links in der Liste, gefiltert werden.
Durch Anwählen des Wegpunktenamens (Bsp. „P1“) können die Einstellungen für den Wegpunkt im Fenster „Parameter“ eingestellt und mit dem Button „Speichern“ bestätigt werden. Durch drücken des Papierkorbs wird der entsprechende Wegpunkt gelöscht. Es können mehrere Wegpunkte auf einmal gelöscht werden, indem die gewünschten Wegpunkte mittels Checkbox markiert und der Button „Löschen“ gewählt wird.